




10月24日,零次方科技发布了其首款人形机器人,代号为Z1。该机器人可以在多种不规则路面、复杂地形中长时间稳定行走,且具备优秀的抗干扰性能,即使受到各方向的强冲击也能保持稳定站立。
视频中的Z1通过观察人类的行为动作,模仿学习攻击招式,以灵活的全身协同控制能力为基础,进行动态防御。攻击、躲避、平衡,两个人形机器人展示了一场别开生面的机器人格斗比赛。
作为零次方首款双足人形机器人,Z1配备最高150Nm关节电机,全身具备27个自由度,载重测试极限高达20kg,负载/自重比超70%。其搭载了自研的EtherCAT通讯模组,整体系统实现低延时高带宽;而Z1在设计之初与众不同的是,团队采用AI技术辅助进行机器人的结构参数设计,实现了更低的能耗(COT)与更高的动态运动性能。其结合自研的物理交互世界模型算法进行运动控制,能够实现出色的抗干扰能力以及各种复杂工况的适应和复杂地形的行走能力。
视频中还出现了和电影《钢甲铁拳》呼应的画面,机器人完美复刻了人类的双臂动作。
零次方创始人闵宇恒表示,计划于今年年底,在无机器人操作设备的情况下进行激情澎湃的人形机器人拳击比赛,实现每个人的机甲梦。而这项技术正是零次方团队在今年9月中旬发布的双臂机器人F1展示过的,团队的算法核心之一: 基于人类视频数据学习(learn from hunman video)

为什么要基于人类视频数据学习?
零次方团队认为, 数据量是实现通用具身操作的必需因素,单位数据成本是产品落地的基础条件 。
近年来,Scaling Law这一词语被多次提及。大语言模型以及特斯拉自动驾驶的Scaling Law也给具身操作领域带来了一定的启发。团队认为,实现具身智能的路径无论是基于多模态大模型,还是通过构建高维世界模型亦或是组合专有领域小模型,无法规避的一点核心就是海量的优质数据。
当前,机器人需要的数据分为三层:第一层是真实的遥操数据,第二种是高质量的仿真合成数据;第三种是人类行为数据,最大的来源是互联网视频。
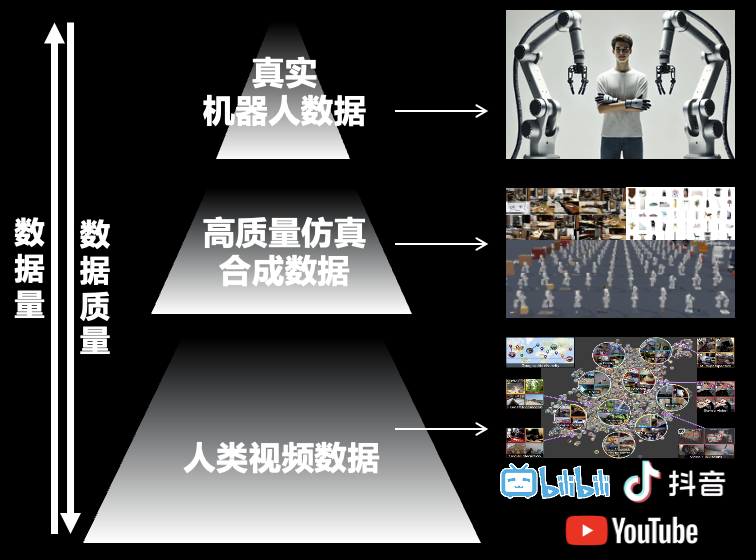
这三层数据的质量由高到低,但不论是真实的遥操数据,还是仿真数据,都面临单位成本高的问题。人类数据的质量最低,但量也是最大的。所以零次方的技术路径主要解决的问题是:如何利用海量的人类视频数据
如何向人类学习?

据了解,有别于当前主流的遥操作技术,零次方科技致力于通过三维人体运动姿态感知模型提取人类关键关节的运动数据,并重映射到机器人身上,而无需人类适应义肢一样使用遥操作设备的学习成本。并且,通过4D高斯溅射技术来重建机器人所需观测信息,最终采用完整的数据训练一个Transformer-Based Diffusion Policy,从而驱动机器人自主完成任务,使其具备直接向人类学习的能力。

基于向人类学习的方式(LFWH),机器人可以构建 base model。在此基础上,能够在仿真训练中进行强化学习,实现更加灵活泛化的操作,以弥补机器人与人之间的先天性结构差异,进而超越人类专家的工作效率,并实现快速部署。
快速部署之后,机器人可根据专项场景的数据以及互联网数据,训练想象生成模型(Imaginator)。通过Imaginator基于初始状态量生成指定任务的plan,再将生成数据和真实数据混合使用。

随着imaginator能力的提升,所需的真实数据逐渐减少,生成数据的比例越来越高,算法的泛化性也随之增强,部署效率因此提高,从而实现数据飞轮效应。最终,Imaginator的想象能力越来越逼近真实,内含无限逼近现实物理规律的世界模型,达到未卜先知,实现真正的通用人工智能。届时人形机器人将走出工厂,走进千家万户,提高人们生产生活的效率。
瞄准制造业产业升级,为中小企业实现降本增效
当前,中国劳动力密集企业有34万家,占制造业比重32%,就业人口近5700万;伴随着人口出生率的下滑,叠加人口老龄化,每年差不多有50万工人的空缺,这个缺口还在进一步拉大。与之并行的是,成本攀升和劳动力人员流动过大,无法满足当前中小型企业资金少、非标制造和市场需求大带来的柔性制造等痛点。
传统的自动化解决方案存在几个问题:一是量太少,不足以支撑改造成本;二是产线比较固定,缺乏柔性,无法改变生产内容,即柔性生产。而协作机械臂的问题在于,部署很难,需要专业人士先进行一周甚至更长时间的调试,用手动编程的方式来实现对机械臂的部署。专业工程师成本高,数量少,中小企业布置一条产线的成本,甚至高于其业务利润。
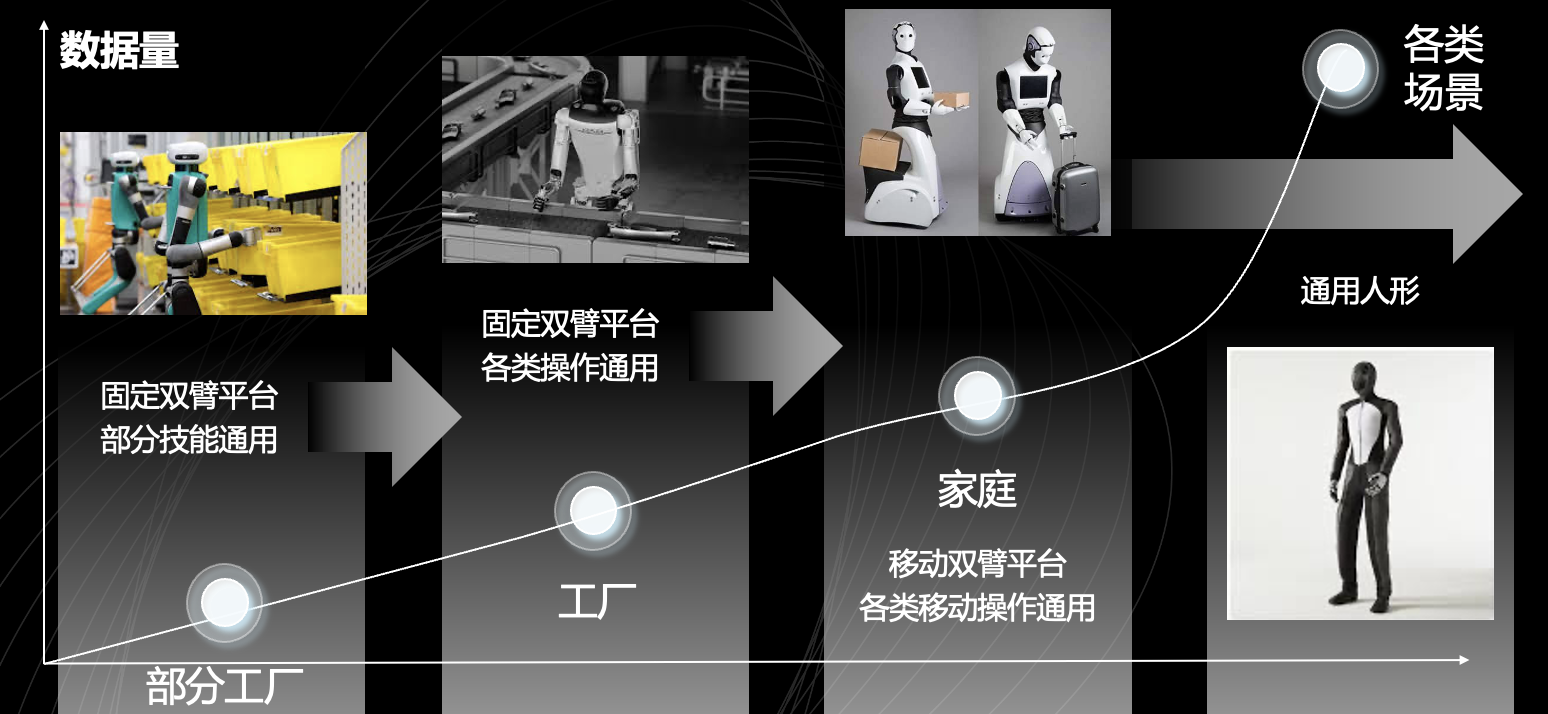
针对中小企业工厂改造难,手动编程等问题,零次方的解决方案是,用机器人自主学习实现原位替代,即以完全仿人的设计,把对应的功能实现替换,不需要改变布局,也不需要编程,就能直接实现“机器学习人的操作,并进行快速部署”,且通过这种持续学习的能力,不断填入数据,以增强机器人在场景方面的泛化能力。
零次方团队表示,现阶段,F1将先被用于专业工厂的专项操作,逐步拓展场景,推动数据飞轮滚动,将模型变得更具泛化性,届时再过渡到更加柔性的家庭场景,最终实现对通用场景的覆盖。
清华&江淮孵化,00后极客团队创业

「零次方」由清华大学和江淮前沿技术协同创新中心共同孵化,团队主创成员来自于 清华大学 AI&Robot智能 机器人实验室 ,在机器人操作及运动控制领域成果突出,发表了数篇TRO、CoRL、ICRA、IROS机器人顶刊论文。团队中同样有来自字节跳动、百度等互联网大厂、节卡等协作机器人公司的业内专业人士,在解决最前沿的科研学术问题、将创新技术转化为商业落地产品方面经验丰富。

「零次方」团队成立于2024年5月,并在短短4个月的时间里完成了两款人型机器人产品,以业内遥遥领先的速度持续创新,立志在三年内实现“人能走的路机器人基本都能走,人能干的活机器人基本都能干”。
闵宇恒表示, 任何非0实数的0次幂都等于1,而0的零次方却无法定义。「零次方」旨在做最本质的创新,拥抱无限可能,实现从零到一。






我要评论