

18年磨一剑,浙江人形机器人创新中心发布通用人形机器人「领航者1号」
-
2024-03-28
来源:极客公园
最近一年人形机器人领域新闻不断,八仙过海、各显神通,在这个已经有着五十多年历史的赛道中也不乏半年内从零到一的故事。
今天,在人形机器人领域 迭代了 18 年的团队 浙江人形机器人创新中心,发布通用人形机器人「领航者1号」。
团队核心成员都来自浙江大学。
2006 年,团队研制出小型仿人足球机器人,实现多机协作踢足球, 连续十多年获得全国冠军 ,四次获得 RoboCup 机器人世界杯仿人组亚军。
2008-2011 年,团队研发出乒乓球对打仿人机器人,实现了 145 个回合的人机对打,并能够适应正反拍、旋转球,获得 浙江省科学技术奖一等奖 。之后团队开始研究新一代室内外快速鲁棒行走人形机器人, 可适应多种地形、推力扰动、动态避障等 。
2023 年 10 月的北京测试中,团队是 「唯一一个」 室外连续通过多种地形并跨越沟壑的团队。

在浙江大学人形机器人「悟空 4.0」的基础上团队进行了全新的升级, 创新性的提出了机理控制、模仿学习与强化学习融合的方法 ,诞生了团队第一款商业化产品 「领航者 1 号」 。
他 身高 150cm,体重 50kg ,拥有 39 个自由度,单臂负载 4kg。搭载彩色相机 4 个、RGBD 相机 2 个、IMU2 个,边缘算力 275 TOPs。
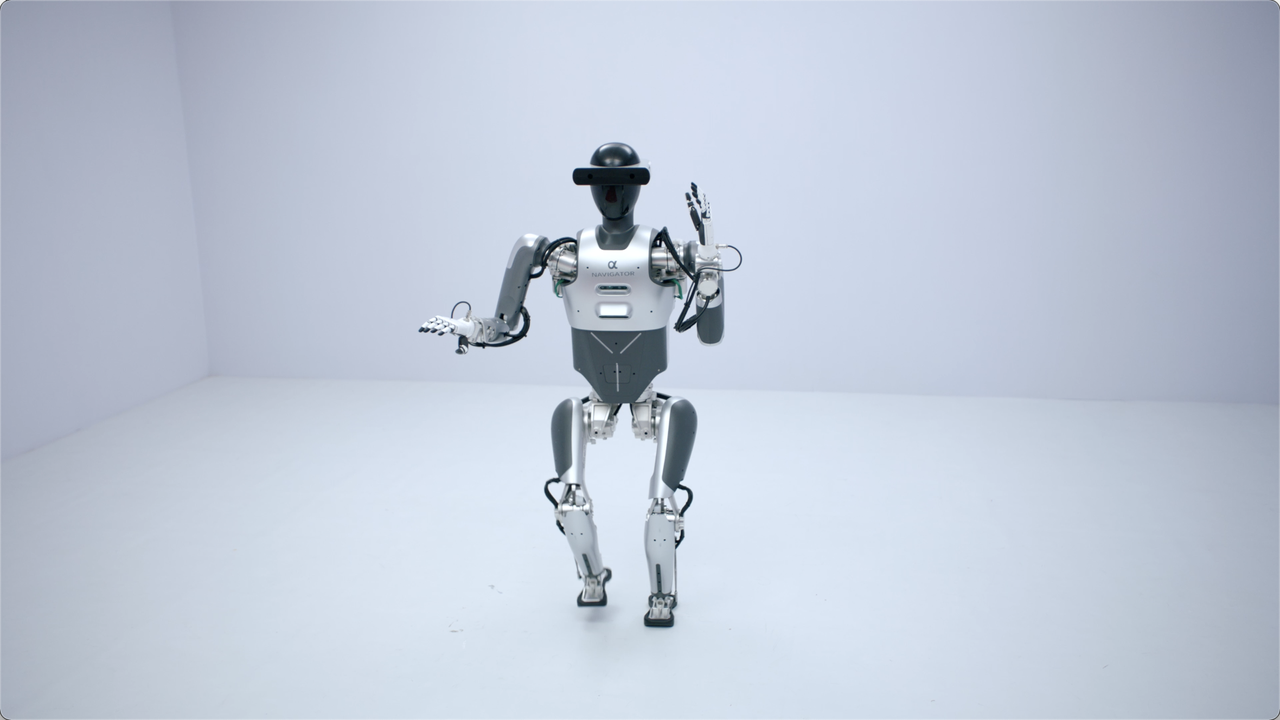
值得一提的是,团队的人形机器人整机系统是完全自主研发,硬件端团队 自研了新型行星减速器、轻量化仿人机械臂和多自由度灵巧手 ,其中多自由度灵巧手有 15 个手指关节,6 个主动自由度,指尖力 10N,单手重量 600g,关节速度 150 度/秒。
算法端也进行了多方面的技术突破。
「领航者 1 号」 采⽤模拟学习同⾮线性运动控制紧密融合的⽅式在对⼈的动作进⾏快速学习的同时考虑机器⼈的执⾏能⼒,打通了⼈的动作映射到实物的整条链路并且可泛化, 赋予了机器人动作类人学习的能力 。
同时 「领航者 1 号」 构建了无模型的端到端伺服控制,不依赖大模型,不依赖物体模型, 可动态 适应 环境操作,摆脱对云端算力的依赖 ,让算法的本地部署更便捷, 部分算法已经在头部工业企业中落地应用并得到了商业上的认可 。
在机器人的臂腿协同控制上, 「领航者 1 号」 也尝试采用 机理建模与强化学习相结合的 方式,保证对不同环境的适应和执行的可靠,目前已经初步实现了机器人的全身运控。
如果你有人形机器人的需求, 欢迎联系团队 sales@zj-humanoid.com ,产品就在办公室(宁波火车站步行 5 分钟的 甬水桥科创中心 ),随时可来参观交流。
团队极度真诚,实事求是。我们质疑常规,有自己的调性和坚持。我们只有一个目标,打造一款真正伟大的人形机器人产品。
如果你也有这个志向, 欢迎发送简历到 hr@zj-humanoid.com 。
- 推荐
- 新闻
- 观点
- 制造
- 金融
- IT/互联网
- 科研/技术服务
- 居民服务
- 文化娱乐
- 家居家具
- 机械装备
- 软件信息
- CEO
- CTO
- CIO
- CDO
- 数字经济
- 工业互联网
- 智能制造
- 人工智能
推荐
 33106
33106 18607
18607 17436
17436 22694
22694 19612
19612 16884
16884
相关文章




我要评论